C304a
Laboratorul “Mecatronica si Echipamente de Automatizare”
Sistemele mecatronice folosesc pentru realizarea functiei impuse energia electrica, hidraulica, pneumatica sau chiar alte surse mai putin conventionale. Toate aceste forme de exploatare energetica isi gasesc locul intr-o gama larga de aplicatii moderne, pornind de la sistemele industriale, medicale si pana la tehnica militara si aerospatiala. Functie de specificul aplicatiei, pot fi in consecinta exploatate avantajele fiecarui sistem de tranfer energetic: precizia si eleganta in actionare a sistemelor electrice, simplitatea constructiva si silentiozitatea sistemelor pneumatice, densitatea de forta si precizia sistemelor hidraulice, in general orice avantaj pe care o anumita transformare energetica il poate constitui pentru o anumita aplicatie.
Proiectarea mecatronica a sistemelor si produselor impune dezvoltarea unor cicluri de modelare, identificare, simulare, sinteza, analiza, optimizare, testare, astfel incat produsul final sa integreze intim, la nivel hardware si software, contributiile tuturor componentelor. Acest mod de abordare a proiectarii stimuleaza efectul de sinergie prin corelarea tuturor resurselor si transformarilor, in scopul aceleasi functiuni.
Laboratorul de mecatronica si echipamente de automatizare (Fig.1) permite dezvoltarea procesului de proiectare mecatronica, avand in dotare standuri specializate de senzorica, servosisteme hidraulice si pneumatice, sisteme de productie modulare, roboti, platforme real-time cu generare automata de cod pentru dezvoltarea si testarea strategiilor de control, controlere industriale de tip PLC, sisteme de procesare a imaginilor etc. Asadar, laboratorul permite studiul componentelor unui sistem mecatronic dar si dezvoltarea de cercetari privind optimizarea unor parametri sau functii ale acestor sisteme. Cateva din resurse precum si aplicabilitatea lor vor fi detaliate in continuare.

Fig.1. Laboratorul mecatronica si echipamente de automatizare
Sistemele mecatronice modulare (Fig.2) reproduc la scara redusa diverse functii existente in procesele industriale. Prin interconectarea diverselor module se configureaza sisteme si procese complexe. Statiile de lucru permit: reconfigurari in conformitate cu diverse aplicatii, dezvoltarea diverselor strategii de control, dezvoltarea conceptelor de control in sistemele integrate, conducerea electronica a sistemelor (PLC si PC), optimizarea functionala a proceselor, implementarea tehnicilor de comunicatie standardizate, dezvoltarea tehnicilor de depistare si remediere a disfunctiunilor. Sunt acoperite urmatoarele domenii tehnologice: sisteme mecatronice, sisteme de actionare (electrice, pneumatice, hidraulice), modelarea si simularea proceselor mecatronice, programarea PLC-urilor, tehnici de control a miscarii/fortei, programarea robotilor, tehnici de manipulare, tehnologii de asamblare, sensorica, tehnici de masurare si monitorizare a parametrilor proceselor, comunicatia standardizata.
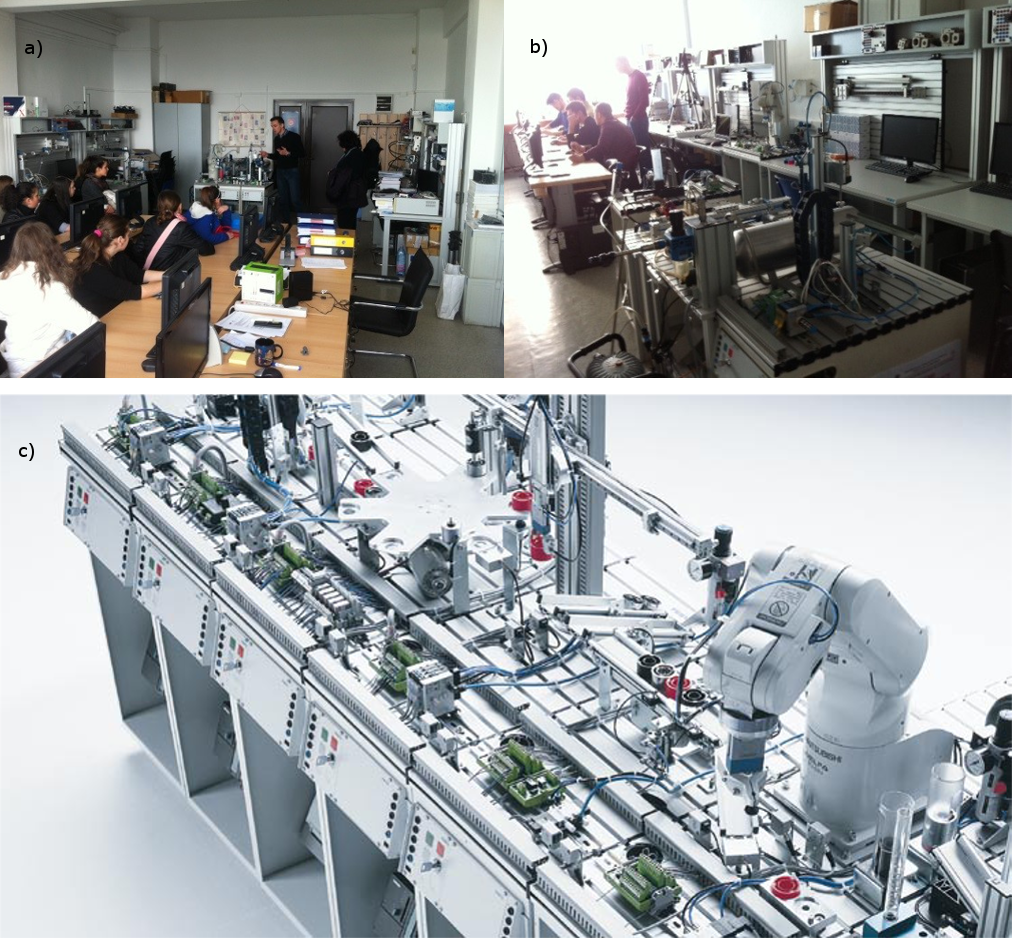
Fig. 2. Statii de productie modulare aflate in dotarea laboratorului: Distributie, Testare, Procesare, Manipulare, Robot serial, Asamblare. Tehnologia de control: PLCs (SIMATIC S7-313C). Software licentiat: Siemens Step 7, COSIMIR-Robotics, COSIMIR-PLC, FluidSIM-P, FluidSIM-H. (a,b – imagini laborator, c – imagini sisteme modulare – catalog Festo)
Sistemele industriale comporta anumite particularitati legate de arhitectura acestora, de limbajele specifice folosite, de standardul de comunicatie utilizat, de accesul limitat la resursele sistemului. Studiul acestora in anii terminali este una fireasca in contextul in care se pregatesc specialisti in domeniul ingineriei. Laboratorul ofera asemenea facilitati atat la nivel educational cat si la nivelul platformelor de cercetare.
Senzori si achizitii de date. Informatia cu privire la valoarea unor marimi din sistem este indispensabila, atat la nivelul de baza al tehnicilor de control implementate, cat si la nivelul de management a functionalitatii sistemelor mecatronice. Utilizarea practica a acesteia implica achizitionarea ei prin intermediul senzorilor, respectiv prelucrarea semnalelor electrice. Standurile laboratorului permit studiul independent al unor grupe de senzori specifici sistemelor mecatronice, respectiv achizitia si prelucrarea semnalelor utilizand software specializat (platforma de achizitii si dezvoltare dSPACE). Standurile includ: senzori inductivi, capacitivi, optici, ultrasonici, marci tensometrice, senzori de presiune piezoelectrici, potentiometre liniare, senzori numerici temposonici, encodere etc.
Controlul miscarii. Chiar daca laboratorul a fost axat initial pe servosisteme hidraulice si pneumatice, senzorica si tehnica de control, ultimile achizitii (Proiect Capacitati PC-111/2007 „Laborator Regional Multifunctional de Mecatronica”, director prof.dr.ing. Vistrian Maties) au vizat acordarea acestuia la conceptele mecatronice aplicate in educatie si cercetare, astfel ca pot fi astazi dezvoltate aplicatii care integreaza diverse tehnologii indiferent de natura energetica a transformarilor (Fig.2 si 3).
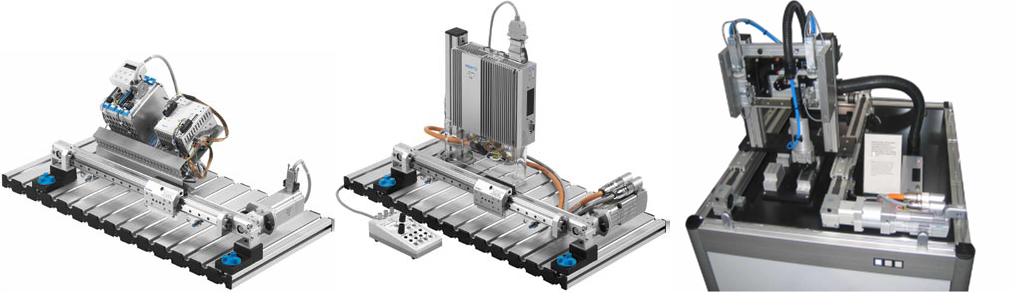
Fig. 3. Sisteme mecatronice aflate in dotarea laboratorului pentru studiul si dezvoltarea algoritmilor de control a miscarii: motoare de c.a si pas cu pas, motoare pneumatice, senzori numerici, controlere digitale in tehnologie PLC sau dSPACE, medii de dezvoltare Matlab/Simulink, dSpace, Step 7, Festo FST.
Proiectarea si optimizarea functionala a sistemelor mecatronice implica proceduri de modelare, identificare, sinteza, analiza si testare a produselor. Tehnica digitala permite implementarea de algoritmi de control care confera flexibilitate, adaptabilitate si precizii sporite sistemelor. Astfel de abordari sunt dezvoltate in cadrul acestui laborator pentru optimizarea functionala a servosistemelor hidraulice si pneumatice.
Controlul sistemelor de actionare hidraulica. Pentru un servosistem hidraulic dat, construirea modelului matematic implica analiza fenomenele fizice asociate: curgerea turbulenta prin diafragme, frecarea in motoarele liniare, compresibilitatea fluidului de actionare, miscarea sertarului sub actiunea electromagnetului proportional. Determinarea constantelor modelului matematic, simularea numerica a procesului, identificarea experimentala a procesului, analiza si testarea modelului sunt etape preliminare proiectarii strategiilor de control. Pentru implementarea acestora, in cadrul laboratorului se utilizeaza platforme de control dSPACE, care permit achizitionarea datelor din sistem, prelucrarea si vizualizarea variabilelor de stare, respectiv controlul servosistemului prin diverse strategii. In Fig.4 se detaliaza standul de hidraulica proportionala si servohidraulica, respectiv tehnologia de control pentru servosistemul din imagine, Fig.4.
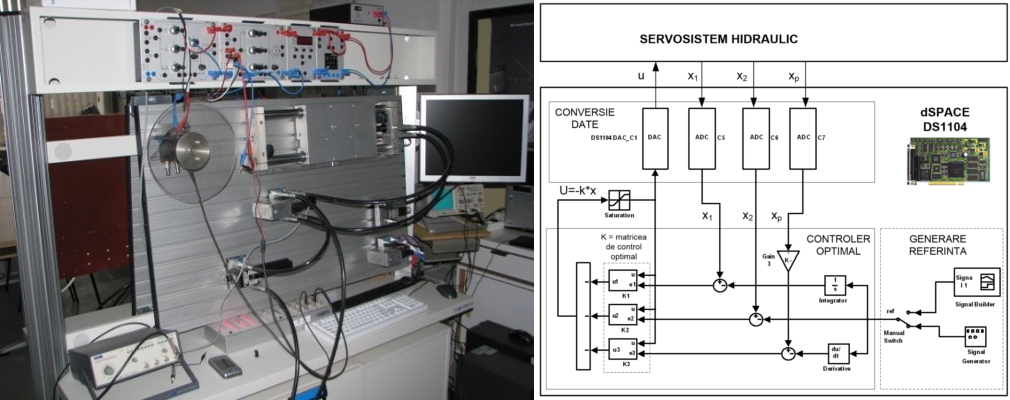
Fig. 4. Optimizarea functionala a servosistemelor hidraulice
Sistemul de dezvoltare dSPACE face parte dintr-o platforma de modelare, simulare si control a sistemelor mecatronice dezvoltata in cadrul proiectului CEEX, CONMEC (Contract CEEX 112/2006, Platforma de modelare, simulare si control cu aplicatii in mecatronica, director prof.dr.ing.Radu Balan).
Alte standuri si echipamente aflate in dotarea laboratorului:
Stand servopneumatica: Controlul sistemelor de actionare pneumatica.
Stand ball&plate: Controlul miscarii utilizand algoritimi de control bazati pe procesarea de imagine.
Celula robotizata de paletizare bazata pe procesare de imagine: controlul miscarii in sistemelor mecatronice.
Alte abordari in domeniul cercetarii vizeaza tehnici de proiectare a sistemelor mecatronice in care parti ale sistemului sunt reale, altele sunt virtuale astfel incat procedurile de testare si validare a rezultatelor sa poata fi derulate chiar in absenta unor componente ale sistemului vizat. Alte directii de cercetare au ca obiectiv optimizarea proceselor de urmarire a traiectoriilor si eliminarea socurilor, reducerea zgomotului in sistemele mecatronice, optimizarea parametrilor miscarii prin prelucrarea optimala a variabilelor de stare, optimizarea tehnicilor de control a impedantei mecanice.
Laboratorul prin conceptie si infrastructura constituie o baza ideala pentru instruire, educatie si cercetare mecatronica, pentru sustinerea procesului de reconversie si orientare profesionala in acord cu meseriile si cerintele UE.

Fig. 5. Laboratorul de mecatronica si echipamente de automatizare