
C303
Laboratorul “Robotica”
Laboratorul de Robotică din cadrul Departamentului de Mecatronică și Dinamica Mașinilor asigură infrastructura necesară desfășurării activităților didactice și de cercetare pentru studenții, doctoranzii si cadrele didactice ale Facultății de Autovehicule Rutiere, Mecatronică și Mecanică, precum si alte facultăți ale Universității Tehnice din Cluj-Napoca. În cadrul laboratorului se derulează activități de cercetare științifică și pregătire doctorală, consolidate de experiența îndelungată a colectivului departamentului în domeniile ingineriei mecanice, mecatronicii și roboticii.
Activitățile practice desfășurate în laborator permit aprofundarea cunoștințelor teoretice dobândite la curs, prin aplicații realizate cu ajutorul echipamentelor și sistemelor robotice disponibile. Utilizarea roboților în cadrul activităților desfășurate contribuie la formarea unei înțelegeri solide a principiilor științifice fundamentale și a tehnicilor specifice sistemelor robotizate, facilitând totodată accesul studenților la tehnologii moderne și stimulându-i în dezvoltarea de soluții pentru diverse probleme aplicative.
Laboratorul este echipat cu sisteme și echipamente industriale și didactice moderne, tehnică de calcul, software specializat pentru modelare și simulare, precum și mijloace multimedia (inclusiv tablă interactivă) pentru susținerea activităților practice și de prezentare. Infrastructura include o rețea de 12 calculatoare dotate cu aplicațiile necesare desfășurării activităților didactice și de cercetare.
Laboratorul asigură baza materială pentru discipline precum: Robotică, Robotică și microroboți, Robotică avansată, Agenți autonomi inteligenți, Automatizarea și robotizarea proceselor industriale specifice mecanicii fine, Elemente de inginerie mecanică ș.a.
Dotarea laboratorului integrează standuri și echipamente specializate, proiectate pentru investigarea aspectelor fundamentale și aplicative ale roboticii. Dintre acestea se amintesc:
Roboti mobili
Dintre roboții mobili educaționali se mentioneaza roboții mobili cu diverse sisteme de locomoție din seria Lynxmotion și roboții mobili ROBOTINO (Figura 4). Au fost de asemenea, dezvoltați și alți roboți mobili cu roți clasice și omnidirecționale, cu șenile și cu sisteme de locomoție hibride.
În Figura 1 sunt prezentați roboți mobili din seria Lynxmotion aflați în dotarea Laboratorului de Robotică. Acești roboți educaționali sunt proiectați inteligent și executați cu precizie din lexan și plăci din aluminiu. Componentele electronice și softurile necesare pentru ca roboții să poată fi utilizați în activitățile didactice de cercetare sunt de asemenea disponibile în laborator.
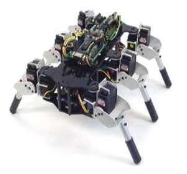



Figura 1. Roboți hexapozi


Figura 2. Roboți bipezi


Figura 3. Robotul mobil 4WD1 cu braț robotic serial Linx 6 Figura 4. Robotul mobil Robotino
Realizările proprii ale laboratorului si alti roboti educationali sunt prezenti în următoarele figuri:


Figura 5. Roboți mobili cu diverse sisteme de locomoție
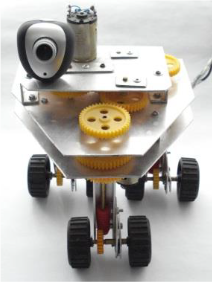
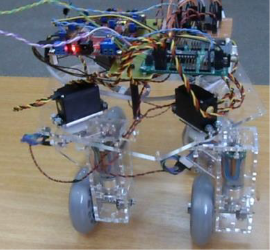

Figura 6. Roboți mobili omnidirecționali cu roți convenționale
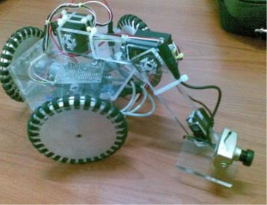
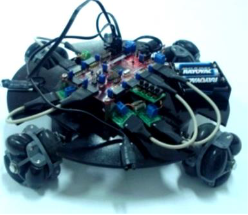


Figura 7. Roboți mobili omnidirecționali
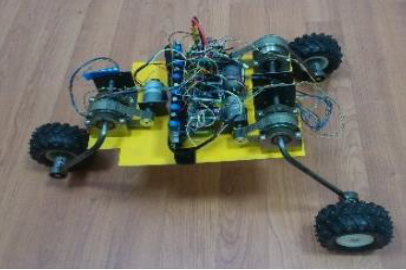
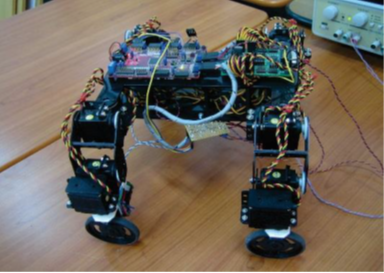
Figura 8. Roboți mobili cu locomoție hibridă picior-roată

Figura 9. Robot cu structură tetraedrică

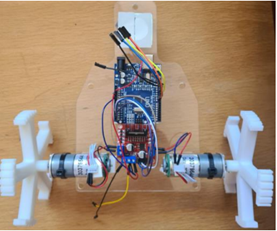
Figura 10. Robot pentru căutare și salvare
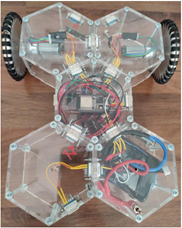
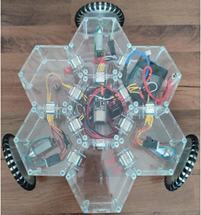
Figura 11. Roboți modulari cu module prismatice hexagonale

Figura 12 Divizie de drone
În cadrul proiectului Modelarea, simularea și realizarea unor familii de sisteme robotizate pentru inspecție și explorare au fost dezvoltate sistemele modulare SRMIE-1, SRMIE-2 și SRMIE-3 prezentate în Figurile 13 și 14.
Aceste Sisteme Robotice Modulare de Inspecție și Explorare (SRMIE) sunt formate din multiple module motoare și pasive conectate între ele prin articulații universale. Modulele motoare asigură funcția de propulsie a sistemului robotizat iar modulele pasive au rol în transportul echipamentului necesar realizării operațiilor de inspecție, explorare etc. Sisteme robotice modulare pot fi utilizate pentru inspecția și explorarea țevilor cu diametre interioare cuprinse între 130 și 200 mm.
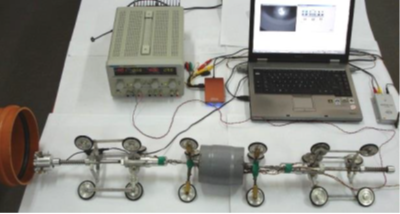
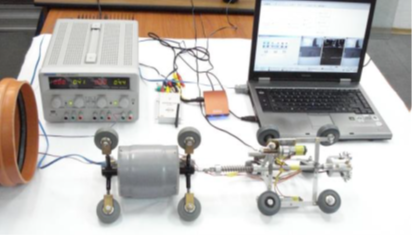
Figura 13. Sisteme Robotice Modulare de Inspecție și Explorare

Figura 14. Sisteme Robotice Modulare de Inspecție și Explorare
Roboți paraleli și sisteme robotice experimentale
Robotul Partner, prezentat în Figura 15, este un robot paralel reconfigurabil ce are la bază lanțuri cinematice de tip PSU/SPR, conform metodologiei de generare a structurilor cinematice descrise în patentul RO 127277 A2.
Construcția robotului permite reconfigurarea rapidă prin modificarea numărului și tipului lanțurilor cinematice, astfel încât pot fi obținute configurații cu grade de mobilitate diferite, adaptate cerințelor experimentale.

Figura 15. Robotul Partner
In Figura 16 este prezentat robotul HIDRA, realizat dintr-o succesiune de 3 module, fiecare alcătuit din segmente elastice circulare, capabile să execute mișcări flexibile pe multiple direcții. Structura sa permite deformări continue, fiind adecvat pentru cercetări în domeniul soft robotics.

Figura 16. Robot Hidra
Pe lângă echipamentele menționate anterior, laboratorul dispune de o serie de dispozitive și instrumente suplimentare care susțin activitățile didactice și de cercetare: interfață dSPACE, sistem de scanare 3D DAVID SLS-3 (Figura 17), surse de alimentare, stație de lipit, osciloscop digital, minicamere video wireless model ELRO, platforme Cypress Microsystem (PSoC® Programmable System-on-Chip™), plăci de dezvoltare Cerebot și Intel Galileo Duo, precum și elemente mecanice specializate, precum roți omnidirecționale și roți de tip TriSTAR.\

Figura 17. System DAVID SLS-3
Download – Prezentarea Laboratorului C303